Со времен Леонардо Да Винчи люди мечтали о настоящих автомобилях — самодвижущихся повозках. Спустя столетия, когда человечество изобрело ДВС, электромоторы и компьютеры становились все лучше, меньше и дешевле. И вот в 21 веке Google показал свой роботомобиль на базе гибрида Toyota Prius. Власти Невады уже приняли, а в Калифорнии обсуждают изменения в законы и правила дорожного движения, связанные с наступлением эры автомобилей-роботов. Мечта Леонардо стала явью.
Давайте вместе с Autopia посмотрим на тот путь, который прошли машины до обретения "самостоятельности"...
Проблески будущего
Идея автономного автомобиля впервые была озвучена широкой публике во время Всемирной Ярмарки 1939 года на экспозиции GM Futurama (нет, это мультсериал назван в ее честь, а не наоборот, как вы подумали) в 1939 году. Экспозиция представляла собой видение автомагистралей и городской застройки будущего. Предполагалось, что улицы города "будут представлять собой залитые светом просторные дороги, обрамленные зелеными бульварами и по этим улицам будут передвигаться автономные автомобили".

GM Futurama
Как пишет историк Джеймсон Уэтмор, - "К 1953 году GM и RCA был разработан макет автоматизированной системы шоссе, что позволило им начать экспериментировать с тем, как электроника может быть использована для управления и поддерживать надлежащий следующие расстояния." В 1958 году компания протестировала Chevrolet с закрепленным спереди устройством, которое, получая сигналы от сети переменного тока, вмонтированной в полотно дороги, приводило в действие рулевое управление автомобиля.
Первый "Умный автомобиль"
Первый "умный автомобиль" — задумывался как платформа для луноходов и разрабатывался в Стэнфорде в 1960-х и 70-х годах. Это было простое багги - тележка, оснащенная видеокамерой и пультом дистанционного управления с очень длинным кабелем. Со временем "интеллект" машины вырос, добавились сенсоры и оборудование для обработки изображений. В 1979 году ученый из Стэнфорда Ганс Моравек достиг того, что было в те годы значимым достижением в автономной мобильности - "Тележка успешно пересекла заставленную стульями комнату без вмешательства человека". У первого "умного автомобиля" этот путь занял 5 часов.

Первый робот-тележка Стендфордского университета.
Фото: Stanford University
Для того чтобы стать полностью автономным, роботомобилю необходимо уметь обрабатывать визуальную информацию о дороге. Первый такой автомобиль был построен в 1977 году учеными из японской Tsukuba Mechanical Engineering Laboratory. Автомобиль был оснащен двумя камерами, которые использовали аналоговые компьютерные технологии для обработки сигналов. Он был способен развивать скорость до 30 км в час.
VaMoRs и VaMP
Немецкий авиакосмический инженер Эрнст Дикманс из Университета Бундесвера в Мюнхене заслужил титул "пионера в создании роботомашин" благодаря проектам, над которыми его коллектив работал в 80-х годах.
В 1987 их VaMoRs, оснащенный двумя камерами и восемью 16-битными процессорами Intel, а также набором различных сенсоров, преодолел расстояние в 20 километров на скорости свыше 90 км/ч. Семь лет спустя машина проекта VaMP, оснащенная двумя камерами с разрешением 320х240 пикселей на расстоянии в 100 метров могла распознавать дорожную разметку и положение автомобиля на дороге относительно других машин. Во время испытаний недалеко от Парижа в условиях, имитирующих дорожное движение, автомобиль двигался со скоростью, доходившей до 130 км/ч. На следующий год Mercedes S-Class под надзором команды Дикмана преодолел путь в 1 600 км из Мюнхена до Оденсе (Дания). Машина развила максимальную скорость в 180 км/ч и по утверждению самого Дикманса, "95% времени ехала в полностью автономном режиме".
Успех работ немецких исследователей привел к тому, что конструкторы в дальнейшем отказались от идеи автономной машины, использующей сигналы от зарытых в землю кабелей, в пользу видеосенсоров.
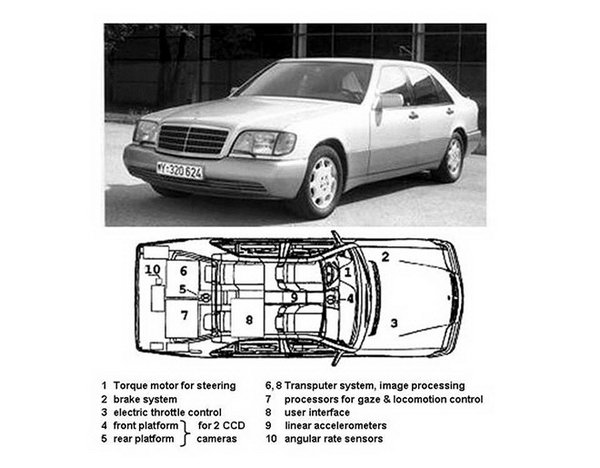
Роботомобиль VaMP на основе Mercedes S-Class.
Фото: Ernst Dickmanns
Через всю Америку, не касаясь руля
В 1995 году Университет Карэги-Мелон продемонстрировал управляемый роботом NavLab 5, созданный на платформе минвэна Pontiac Trans Sport. Автомобиль проехал по маршруту Питтсбург - Лос-Анджелес под лозунгом "Через всю Америку, не касаясь руля".
Установленное оборудование включало в себя портативный компьютер,закрепленную у лобового стекла камеру, GPS-приемник, а также некоторое дополнительное оснащение. "Показатель автономности" за время теста достиг отметки в 98,2% - помощь человека понадобилась лишь в нескольких случаях для преодоления препятствий. Наибольшее расстояние, которое которое машина оставалась под управлением компьютера, составило 70 миль.
Примечательно, что по прибытии в Лос-Анджелес команда испытателей встречалась с известным телеведущим и фанатом машин Джеем Лено, который заявил, что "не видит особой пользы от таких технологий", потому что ему нравится водить машину. Сегодня мистер Лено один из самых горячих поклонников электромобилей и прочих технологий будущего...

NavLab 5 на базе Pontiac Trans Sport .
Фото: Mellon University
Grand Challenge
Желая подстегнуть исследования в области автономной мобильности, американское агентство по оборонным исследованиям (DARPA) стало учредителем соревнований роботомобилей. В 2004 году первая гонка DARPA Grand Challenge прошла в пустыне Мохаве. Результат был удручающим — ни один из 15 участников не смог преодолеть 150-мильную дистанцию, проложенную сквозь каменистую пустыню. Наилучший результат в 7,5 миль показала Red Team Университета Карнеги-Мелон, чей автономный Humvee лидировал в гонке, пока не вылетел с дороги, не сумев удержаться при прохождении "шпильки".

Роботомобиль разработанный в рамках исследований DARPA.
Фото: Carnegie Mellon University
Не испугавшись неудачи, DARPA удвоила денежный приз до 2 млн долларов. На этот раз из 23 команд, стартовавших в 132-мильной гонки по Мохаве, пять достигли финиша. Это был сложный пробег, который включал в себя три туннеля, более 100 поворотов и навигацию через крутой перевал с резким перепадом высот. Стэнфордский университет занял первое место со своими "Стэнли" — автономными Volkswagen Tourareg, которые завершили гонку за 6 часов и 54 минуты.

Роботомобиль VW на гонке 2005 Grand Challenge DARPA.
Фото: Volkswagen
Grand Challenge переезжает на улицу
В 2007 году в DARPA решили еще более усложнить условия ралли и добавить к маршруту 60-мильный городской участок. На этот раз число команд-участников достигло 89, из которых до городского участка добрались лишь одиннадцать. Спецучасток состоял из оборудованной на территории бывшей авиабазы Джордж, имитации городской проезжей части, на которой машины должны были взаимодействовать с автомобилями, управляемыми людьми. Команда Карнеги-Мелон Tartan Racing на автомобиле Chevrolet Tahoe "Boss" завершила этап чуть более чем за 4 часа.

Исследования DARPA в настоящее время переместились в город — часть маршрута Tachoe "Boss" успешно передвигался в плотном городском потоке.
Фото: DARPA
Вторыми пришли ученые из Стэнфорда под руководством Себастиана Труна на своем "Младшем", переоборудованном из Volkswagen Passat.
Приключения итальянцев
Пока американцы гоняли по пустыне, в Старом Свете продолжили исследования и отметились самым протяженным пробегом автономной машины. Эта слава досталась исследователям Университета Пармы. Их VISLAB в 2010 году преодолел расстояние от Пармы до Шанхая, что составило 16 000 км и заняло 100 дней.
В России экипаж впервые попал в ДТП по собственной вине — выйдя из машины, выключив навигацию, они забыли отключить систему управления и автомобиль въехал в лидера колонны. Тогда же роботомобиль чуть было не стал первой автономной машиной, которой был выписан штраф, но инспектор просто впал в ступор, увидев, с чем имеет дело и не понимая, кому же выписывать квитанцию.

VISLAB — обладатель рекорда по продолжительности и протяженности маршрута
Фото: Университет Пармы
Шэлли лезет в гору
Автономный Audi TTS получил имя "Шэлли" в честь гонщицы Мишель Мутон – пилота Audi, ставшей первой женщиной, победившей в гонке Pikes Peak International Hillclimb. "Шэлли" была спроектирована коллективом все того же Центра Автомобильных исследований Стэнфордского Университета под руководством Криса Гердеса. Машина оснащена GPS, датчиками скорости вращения колеса и контролем курсовой устойчивости со специальным алгоритмом, который позволяет машине ехать "на пределе".
Автомобиль был испытан во время подъема на Пайк Пик (12,24 мили), который робот преодолел за 27 минут, в то время как рекорд, установленный человеком — 17 минут. Однако, принимая во внимание, что у парового автомобиля в 1901 на преодоление этой дистанции ушло более 9 часов, для одной из первых машин, управляемых компьютером, 27 минут - это отличный результат.

Shelley во время испытаний на дне озера Бонневиль
Фото: Университет Стэнфорд
Google становится на колеса
Парк из семи автомобилей Google на базе Toyota Prius с 2010 года к сегодняшнему дню накатал уже более 140 000 миль, только изредка прерывая автономную езду вмешательством человека. Программу участия гугломобиля в гонке Darpa Grand Challenge возглавляет уже известный вам Себастиан Трум.
Гугломобиль использует информацию сервиса Google Street View, совмещая ее с данными, которые робот получает с камер на машине, системой LIDAR (Light Identification, Detection and Ranging — технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеивания в прозрачных и полупрозрачных средах) и радаром. Испытания показывают, что гугломобиль действительно хорошо ориентируется на дороге и в таком оживленном городе как Сан-Франциско. Но человек пока всегда за рулем. На всякий случай.
В Google утверждают, что их технология чрезвычайно безопасна и одновременно способна снизить заторы на дорогах и число вредных выбросов. Власти Невады уже приняли закон, разрешающий использование автономных машин. На подходе штат Калифорния.

Губернатор Невады Брайан Сандовал после поездки на гугломобиле.Фото: Sandra Chereb/Associated Press














Добавить комментарий